About
I am a master’s student in Control Science and Engineering at Shanghai University of Engineering Science. My research focuses on robot learning, embodied AI, LLM agents, mobile agents, and human-feedback decision systems. I am interested in building agents that connect perception, task-level reasoning, external knowledge, and low-level control in deployable autonomous systems.
Email / Google Scholar / GitHub
News
- May 2026: Our human-in-the-loop multi-agent ventilator decision support work is available on arXiv.
- Mar. 2026: Our hierarchical quadruped navigation work is available on arXiv.
- Jan. 2026: Our mobile-agent knowledge retrieval work is available on arXiv and appears in WWW 2026.
- 2025: HeStIa was accepted to IEEE/RSJ IROS 2025.
Selected Research
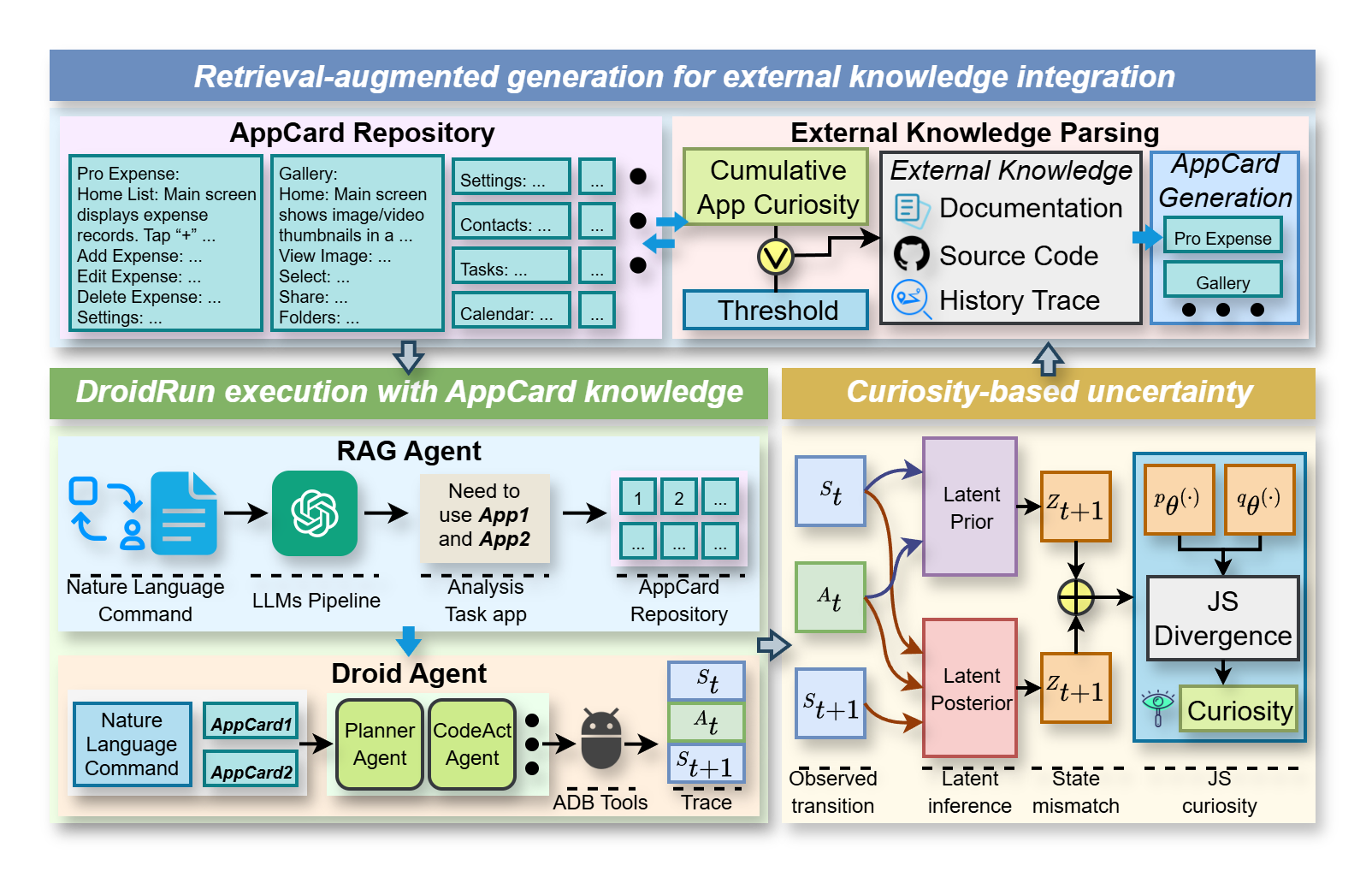
Curiosity Driven Knowledge Retrieval for Mobile Agents
ACM Web Conference 2026 (WWW'26), Top 20%, 2026.
The method estimates execution uncertainty, retrieves task-relevant external knowledge, and organizes it as AppCards that encode app functions, UI mappings, parameters, and interaction patterns.
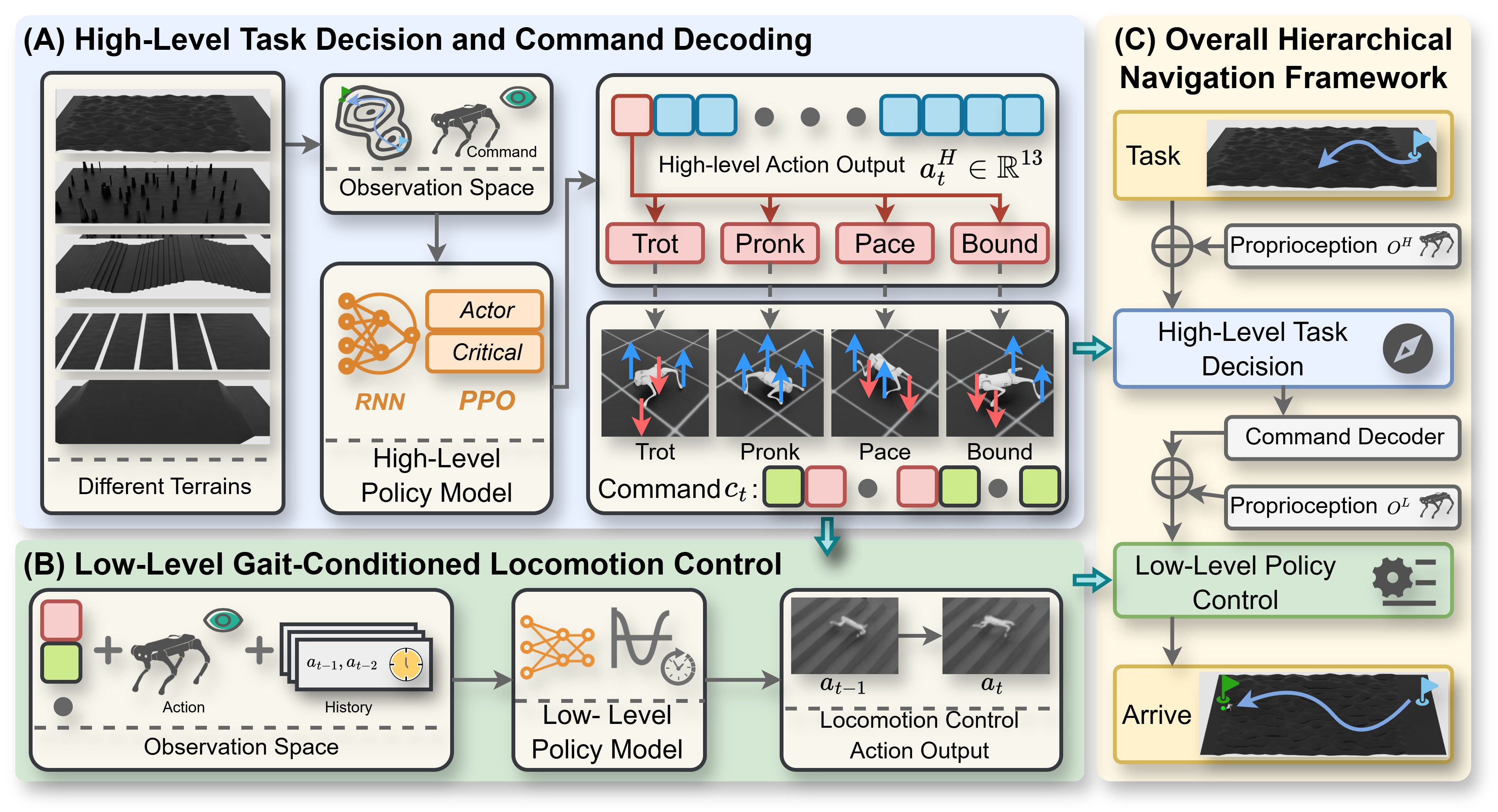
Task-Level Decisions to Gait-Level Control
IROS 2026 under review / arXiv preprint, 2026.
The framework connects sparse task-level semantic and geometric cues with gait-conditioned low-level reinforcement-learning control, improving interpretability and policy debugging on mixed terrains.
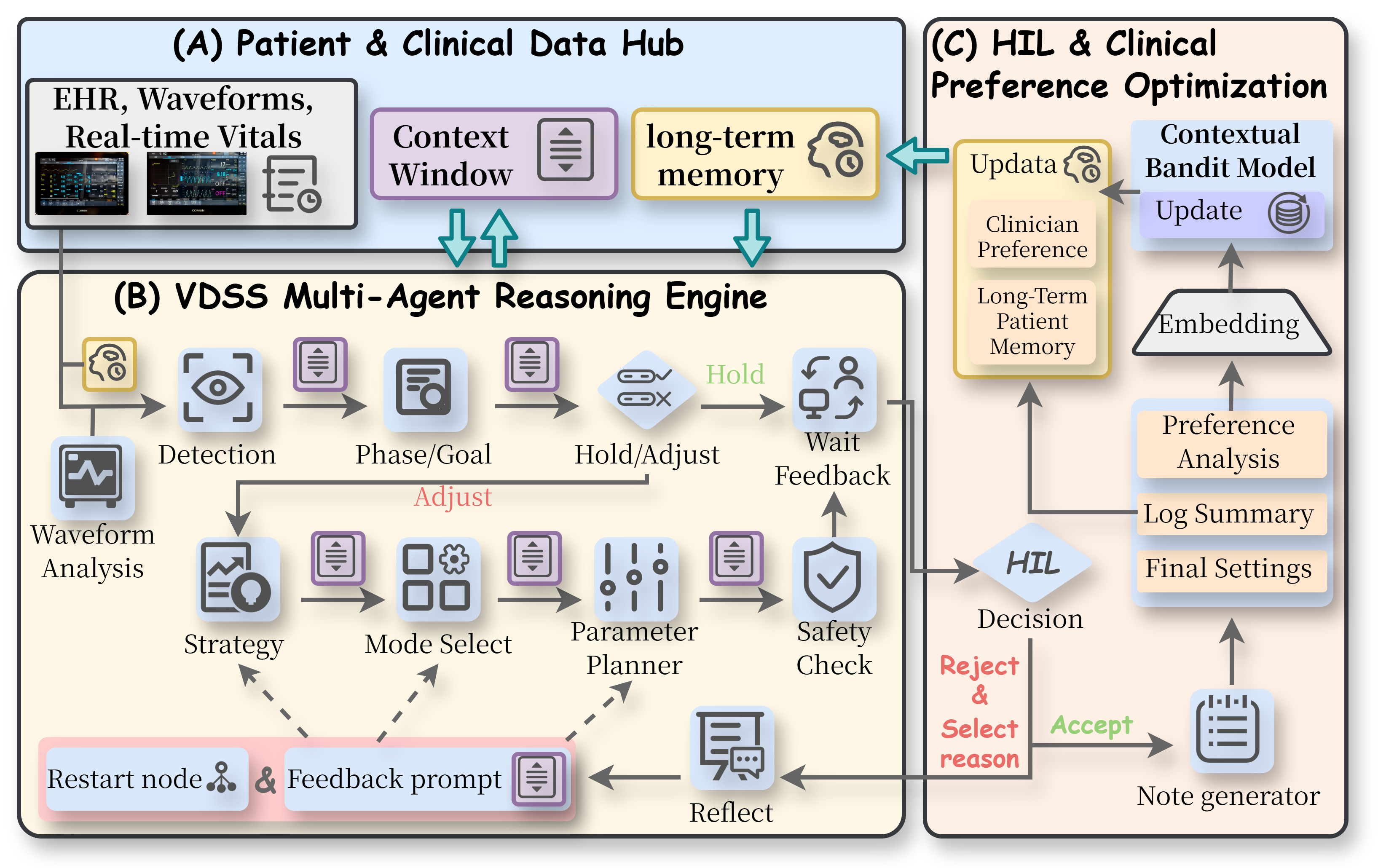
Human-in-the-Loop Multi-Agent Ventilator Decision Support
MICCAI 2026, Top 8%, 2026.
The system uses contextual bandit preference learning to incorporate expert feedback and update decision policies in high-risk clinical scenarios.
HeStIa: Asynchronous Embodied Dynamic Locomotion Learning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025.
HeStIa explores asynchronous embodied dynamic locomotion learning for walking robots through multimodal large language models, connecting high-level multimodal reasoning with dynamic locomotion behavior.
Research Interests
- Robot learning and embodied AI: hierarchical policies, reinforcement learning, quadruped navigation, sim-to-real transfer, and deployable autonomous systems.
- LLM and mobile agents: curiosity-driven retrieval, tool use, GUI automation, AppCards, and long-horizon task execution.
- Human feedback and decision learning: contextual bandits, preference modeling, human-in-the-loop evaluation, and reliable policy updates.
- Multimodal perception and control: MLLM perception, semantic meta-commands, and reinforcement-learning control for embodied systems.
Selected Awards
- National Third Prize, 10th China Graduate Smart City Technology and Creative Design Competition, 2024.
- Shanghai Regional Third Prize, China Robotics and Artificial Intelligence Competition, Quadruped Bionic Robot Track, 2024.
- Shanghai Regional First Prize, 12th Shanghai College Student Engineering Practice and Innovation Ability Competition, 2022.
- National Third Prize, 24th China Robotics and Artificial Intelligence Competition National Final, 2022.
- Shanghai Regional First Prize, 2022 Shanghai TI Cup Undergraduate Electronic Design Contest, 2022.